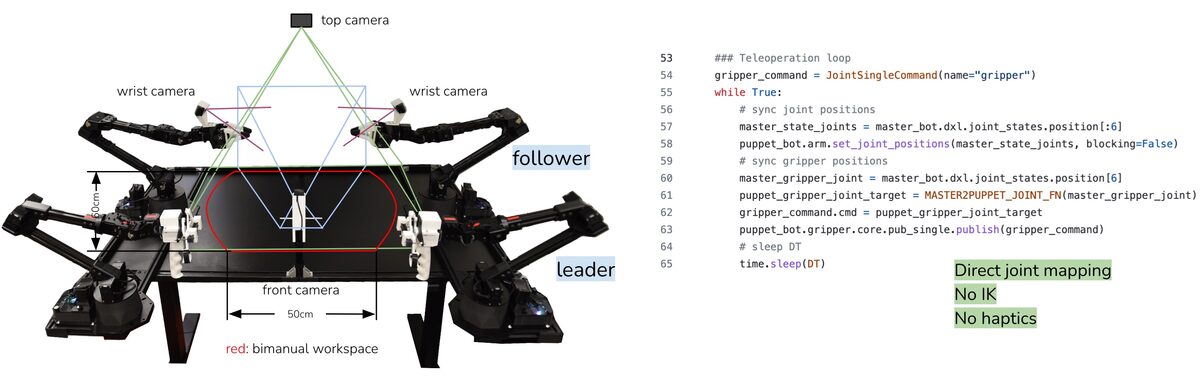
Introducing ALOHA 🏖
ALOHA stands for “A Low-cost Open-source Hardware System for Bimanual Teleoperation”, which is certainly a stretch in terms of acronym, but the project itself is so cool that I don’t think it really matters… Here’s the pitch:
Fine manipulation tasks, such as threading cable ties or slotting a battery, are notoriously difficult for robots because they require precision, careful coordination of contact forces, and closed-loop visual feedback. Performing these tasks typically requires high-end robots, accurate sensors, or careful calibration, which can be expensive and difficult to set up. Can learning enable low-cost and imprecise hardware to perform these fine manipulation tasks? We present a low-cost system that performs end-to-end imitation learning directly from real demonstrations, collected with a custom teleoperation interface.